Hibrit
İnsansız Hava Aracı ile Otonom Teslimat Sistemi Geliştirilmesi
- Proje
Yürütücüsü: Prof. Dr. Erdinç Altuğ
- Projeyi
Destekleyen Kuruluş: TÜBİTAK
Özet: 20. yüzyılın son çeyreğinde
hayatımıza giren insansız hava araçları (İHA) özellikle son yıllarda
sadece hobi-eğlence alanında var olmaktan sıyrılarak, gündelik hayatımıza
olumlu etkiler yaratacak görevlerde kendini kanıtlamaya başlamışlardır.
Yangını tespit ve müdahale, kazazedelerin bulunması, yapıların teknik
incelenmesi ve hasar tespiti, sınır güvenliği, acil durum yardım ve kargo
teslimatı gibi birçok görevde faydalı olabilecekleri görülmüştür.
Gelecekte bu sistemlerin gündelik hayatlarımıza daha fazla katkı
sağlamaları beklenebilir. Lojistik sektöründe hızlı kentleşmenin getirdiği
nüfus ve yoğunluk artışı, ayrıca artan e-ticaret ve market teslimatları
ile sektörde artan talebi karşılamada güçlük ve teslimat verim düşüklüğü
ortaya çıkmaktadır. Özellikte pandemi döneminde
insan varlığına ihtiyaç duymayan teslimat yöntemlerine ihtiyaç ortaya
çıkmıştır. Özellikle şehir içinde trafiğin belirli bir bölümünü karadan
havaya alarak trafik yoğunluğu, teslimat zamanının artışı gibi sorunları
azaltarak, lojistik sektöründe büyük bir rahatlama yaratılabilir.
Literatürde İHA sistemleri ile kargo
teslimatına yönelik birçok çalışma ve çeşitli başarılı örnekler vardır. Bu
projede bu sistemlerin eksiklerin olarak görülen iniş kalkış gerekliliği
ve tek paket teslimatı gerekliliği gibi bazı eksikliklerin giderilmesi
amaçlanmıştır. Hem dikine kalkış iniş yapabilecek hem de sabit kanat
özelliği olan hibrit hava aracı tasarlanarak,
hızlı prototipleme yöntemleri ile üretilmiştir.
Birden çok paketi taşıyabilecek kapasitede olan bu hava aracı İHA1
kategorisindedir. Hava aracının matematik modeli oluşturulmuş ve gerekli
kontrolcü yapıları geliştirilmiştir. Akıllı paket sistemlerinden iki adet
prototip üretilmiştir.
Tasarlanıp üretilen sistemlerin
simülasyon ve çeşitli deneyler yapılarak önerilen sistemin
ve kontrol algoritmaların başarılı olduğu teyit edilmiştir. Ülkemizde
alanındaki ilk projelerden olan bu çalışma ile önerilen sistemin
fizibilite çalışması ve ilk denemeleri yapılmıştır. Değişik paydaşlardan
alınan geri dönüşler önerilen sistemin birçok alandaki ihtiyacı
giderebileceği ve ticari başarısının olabileceğini göstermektedir.



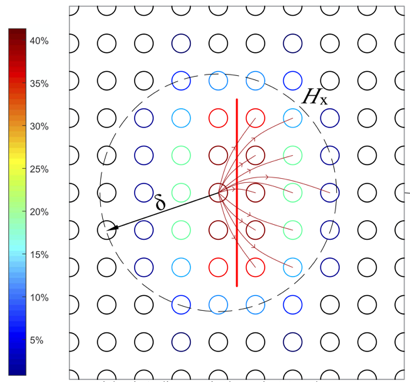
Fonksiyonel
Derecelendirilmiş Malzemelerin Peridinamik Yöntemiyle
Darbe Yükü Altında Kırılma Davranışının Modellenmesi ve Analizi
- Proje
Yürütücüsü: Dr. Adem Candaş
- Projeyi
Destekleyen Kuruluş: TÜBİTAK 2219
Özet:
Projede Peridinamik teorisi kullanılarak, Fonksiyonel
Derecelendirilmiş Malzemelerin (FDM) dinamik kırılma davranışlarının modelleme
ve analiz çalışmaları yapılmıştır. Daha önceki çalışmalar kırık ilerleme
hızının FDM’lerin malzeme modellerine bağlı olarak
değiştiğini göstermektedir. Bu araştırmada state-based
Peridinamik teorisi kullanılarak FDM’lerin
mikro kırıklar içerdiği durumlarda malzeme dayanımında meydana gelen değişimler
araştırılmıştır.
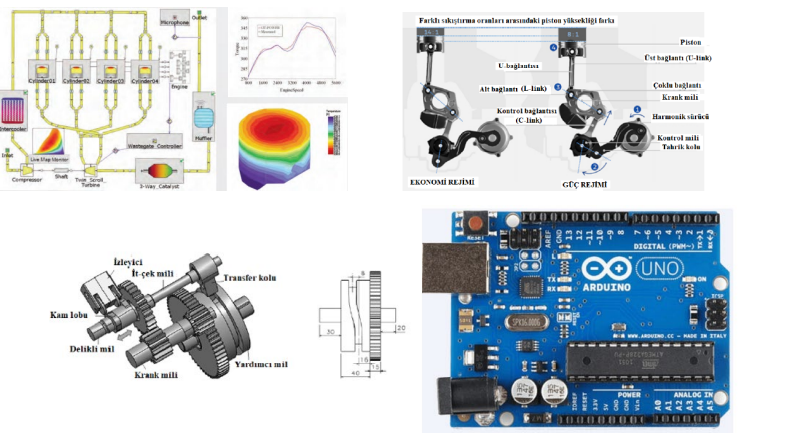
Değişken strok hacmi ve Atkinson çevrimi
stratejilerinin bir arada kullanılmasının kıvılcım ateşlemeli motorlarda
incelenmesi: Tasarımsal, Deneysel ve Nümerik bir araştırma
- Proje
Yürütücüsü: Dr. Öğr. Üyesi Barış
Doğru
- Projeyi
Destekleyen Kuruluş: TÜBİTAK 3501
Özet: Yükün
konvansiyonel olarak hava filtresi ile emme manifoldu
arasında bulunan gaz kelebeği (kısılma valfi) ile kontrol edildiği buji
ateşlemeli (SI) motorların şehir içi trafik koşullarındaki yüksek gaz
değişim kayıpları ve düşük hacimsel verimleri yakıt tüketimi ve kirletici
emisyonları üzerinde etkili olan temel problemlerdir. Daha az taze dolgu
gereksinimi ve daha kısık gaz kelebeği konumu yani hava akımı kısıtlaması
nedeniyle, SI motorları kısmi yük koşullarında daha az güç üretimine ek
olarak çok daha fazla gaz değişim işi yapmaya zorlanır. Bu sorun, düşük
yanma kalitesine, yetersiz yanma hızına ve ayrıca yüksek yük koşullarına
kıyasla kısmi yük koşullarında güç çevrimi sırasında aşırı düşük indike verimlilikle ilgili olarak beklenmedik şekilde
daha fazla yakıt tüketimine neden olur. Ayrıca karayolu taşımacılığı
emisyonları, hava kirliliğinin ana kaynağı olarak gösterilmekte ve üst
düzeyde çevre koruma sağlamak için çeşitli mevzuat, politika ve
yönetmelikler ile kontrol altında tutulması amaçlanmaktadır.
Şehir içi trafiğindeki gibi düşük hız gerektiren durumlarda
güç gereksinimi azaldığından, motor kısmi yük koşulunda çalışır. Yaygın olarak
kullanılan benzin motorlarının yükü azaldıkça efektif verim çok büyük bir hızla
düşmektedir. Bunun en büyük nedeni yük kontrolünün gaz kelebeği ile yapılması
ve düşük yüklerde emme kanalındaki gaz kelebeğinin kapanması sonucu meydana
gelen kısılma kayıplarındaki artıştır.
Benzin motorlarındaki kısmi yük verimi sorununa karşın
kullanılan tekniklerden üçünü bir araya getirerek mekanik bir çevrim atlatmanın
değişken subap zamanlaması ve değişken sıkıştırma
oranının motor performansı üzerindeki birleşik etkisi ve kirletici emisyonlara
olan azaltıcı etkisi projenin konusunu oluşturmaktadır.
Bu çalışmanın ilk amacı, performansı en üst düzeye çıkarmak
ve egzoz emisyonlarını azaltmak için buji ateşlemeli (SI) motor gaz kelebeği
açısı, ateşleme zamanlaması ve püskürtme zamanlaması giriş değişkenlerini
optimize ederek kontrol tabanlı bir matematiksel motor modeli oluşturmaktır. Bu
çalışmanın ikinci amacı, emme ve egzoz subabı
aktivasyonunun optimizasyonu ile çevrim atlatma mekanizmasına değişken bir subap zamanlama sistemi uygulamaktır. Bu stratejinin
ilavesi ile çevrim atlatma ile artan egzoz kirleticileri için önemli bir azalma
sağlanacaktır. Bu çalışmanın üçüncü amacı, farklı kısmi yük koşulları altında
yakıt tüketimi ve egzoz kirleticileri açısından atlatmalı çevrim ile SI
motorunun emme subabı kapanma zamanlamaları ve
geometrik sıkıştırma oranını birlikte optimize etmektir. Optimizasyon
metodolojisi, geometrik sıkıştırma oranındaki artış ile emme subabı kapanma profili gecikmesi arasındaki dengeye
dayanmaktadır.
Hibrit ve elektrikli araçlara tamamen geçilmeden önce yaklaşık
olarak 2020-2035 yılları arasında yaşanacak “İçten yanmalı motorlardan
elektrifikasyona geçiş süreci” nde mümkün olduğunca
daha çevreci ve yakıt tüketiminde dost motor teknolojilerinin teşvik edilmesi
konusunda başarılı bir uygulama örneği olacaktır.
Yat Gövdelerine
Hücresel Kafes Yapılarının Yerleştirilmesi ve Gövdenin Hidrodinamik ve Yapısal
Optimizasyonu
- Proje
Yürütücüsü: Doç. Dr. Erkan GÜNPINAR
- Projeyi
Destekleyen Kuruluş: TÜBİTAK
Özet: Katmanlı imalat, geleneksel yöntemlerle elde
edilemeyen karmaşık geometrilere sahip detaylı modeller oluşturur. Örgü
yapıların entegrasyonu, hafif modeller üreterek yapısal özellikleri
iyileştirir, malzeme kullanımını ve birim maliyetleri azaltır. Projemiz, hafif
tasarımlar için yat gövdelerine örgü yapıların entegrasyonuna odaklanmaktadır;
yapısal ve hidrodinamik kriterler için optimize edilmiş, benzersiz bir
araştırma hedefine yöneliktir.
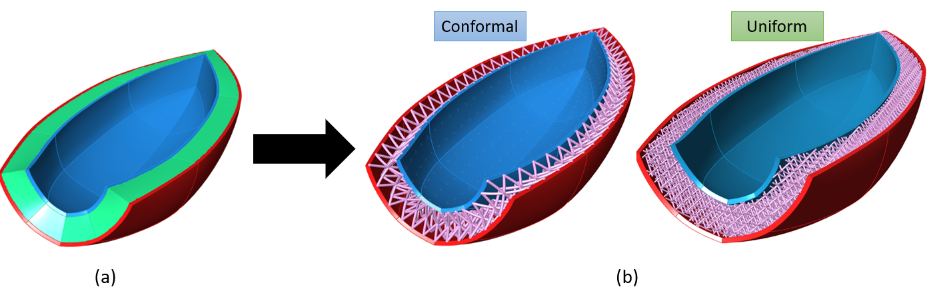
Figure 1
(a) Bir gövde üç katmana ayrılır: dış (kırmızı renkte), iç (mavi renkte) ve
orta katman (yeşil renkte). (b) Gövdenin orta katmanı, uyumlu ve düzenli örgü
yapıları ile temsil edilir.
Yeni Polihedral Spline
Konfigürasyonlarının Önerilmesi Ve Polihedral Spline'Lar Için Dörtgen-Baskın
Çözüm Ağı Algoritmalarının Geliştirilmesi
- Proje
Yürütücüsü: Doç. Dr. Erkan GÜNPINAR
- Projeyi
Destekleyen Kuruluş: TÜBİTAK
Özet:
B-spline
yüzeyler, genellikle dörtgen çözümlerle ifade edilebilir; ancak daha az eleman
içeren quad-dominant çözümleri doğrudan ifade edemez.
Karciauskas ve Peters
(2019, 2022), quad-dominant çözümler için polihedral spline çözümleri
geliştirmiştir. Bu çalışma, literatürde henüz keşfedilmemiş yeni polihedral spline
konfigürasyonlarını önererek bu çözümler için spline
çözümleri geliştirecektir. Ayrıca, sadece polihedral splineleri içeren bir çalışma, üçgen ağları
dörtgen-dominant ağlara dönüştürebilen bir algoritma içerecektir. Proje, hem mevcut hem de yeni önerilen polihedral
konfigürasyonları dikkate alan yeni bir dörtgen-dominant ağ algoritması
geliştirmeyi amaçlamaktadır.
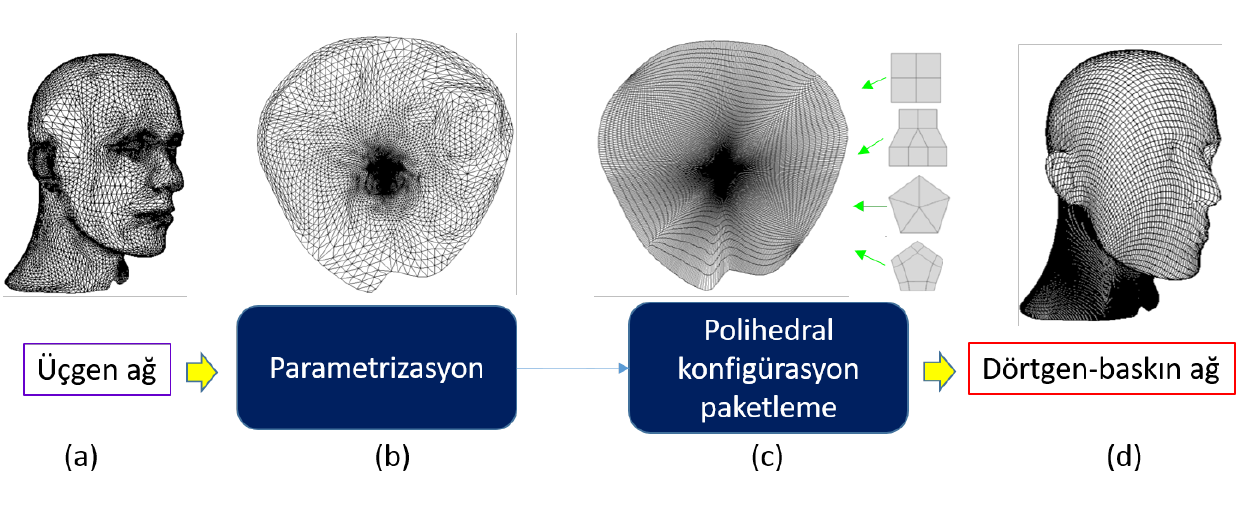
Figure 2
. Üçgen ağ ile ifade edilen yüz modeli (a), önce iki-boyuta serilecek (b) ve
iki-boyutlu düzlem üzerinde yeniden düzenlenerek, polihedral
spline konfigürasyonlar kullanılarak dörtgen-baskın a˘g yapısına dönü¸stürülecektir
(c). Daha sonra iki-boyuttaki dörtgen-baskın a˘g
üç-boyuta geri dönü¸stürülecektir (d)
Otomotiv
Sektörüne Yönelik Polyester Matrisli Cam Elyaf
Takviyeli Kompozitlerin Karbon Nanotüp
ve/veya Grafen Katkıları ile Hafifleştirilmesi ve
Akustik Özelliklerinin Geliştirilmesi Projesi
- Proje
Yürütücüsü: Prof. Dr. Levent TRABZON
- Projeyi
Destekleyen Kuruluş: TEYDEP - TÜBİTAK
Özet:
Proje kapsamında otomotiv
sektöründe gelişen teknoloji trendlerine uyum sağlanarak araç ağırlıkları
azaltılarak karbon emisyonu düşürülecek ve aynı zamanda akustik özelliklerinin
de geliştirilmesi sağlanılacaktır. Kompozit parçaların kalınlığı elyaf katman sayısına
bağlıdır, karbon nanodolguların yapıya dahil edilmesi
elyaf katman sayısını azaltacak, bu sayede prototip parça kalınlığı
düşürülecektir. Karbon nano dolguların kullanımı kompozit parçanın akustik iletim kaybı özelliklerine
pozitif yönde katkı sağlayacaktır. Akustik iletim kaybı özelliklerinin
gelişmesi, otomobilin konfor özelliklerini arttırıp; insan sağlığını olumlu
etkileyecektir.
AB Konseyinin Yeşil
Mutabakat kapsamında projemizin hedeflerini de kapsayan ürünler ile meydana
çıkacak olan çalışmaların sonucunda çevresel duyarlılığı yüksek, yenilikçi
yeşil kompozit ürünler üretilecektir. Sürdürülebilir
ürün üretim yönergesi, ulusal alanda döngüsel ekonomi modeline geçiş sürecimizi
bir hayli hızlandıracaktır. Bu geçişin en önemli ayağını otomotiv sektörü
oluşturmaktadır. Çok ölçekli kompozit parça içerisine
eklenecek katkılar ve yapılacak topoloji optimizasyonu ile mekanik ve akustik
özellikler iyileştirilecektir.
Aynı zamanda akustik
özelliklerdeki artış ve prototip parçanın sadece mekanik değil birçok
fonksiyonda önemli artılar kazanmasıyla Dünya'nın ihtiyaçlarına hitap eden,
ticarileşme potansiyeli yüksek bir ürün ortaya konacaktır.
Sürdürülebilir
Gıda Üretimi için
Kuvantum Nokta ile Zenginleştirilmiş
Hidrojel Nano Kompozitlerin Gübre Olarak Çok Yönlü Tarım
Uygulamaları
- Proje
Yürütücüsü: Prof. Dr. Levent TRABZON
- Projeyi
Destekleyen Kuruluş: Güneydoğu
Asya-Avrupa Araştırma ve İnovasyon Birleşik Fonu
Özet:
2050 yılında dünya nüfusunun 9.9
milyara ulaşması beklenmektedir. Dünyadaki hızlı nüfus
artışı
sebebiyle sürdürülebilir gıda üretimi ve yetiştiriciliği
açısından beklenmedik değişimler
olacaktır. Bu yüzden toprakların ve suyun hızlı
bir şekilde bozulmasının etkilerini tolere etmek için yeni yöntemlerin bulunması fazlasıyla önemlidir.
Böylece ekolojik yaklaşımlarla
beraber yüksek etkili tarıma ait endişeler araştırılmalı
ve sürdürülebilir alternatifler
uygulanmalıdır. Nanomalzemeler; nanogübre,
böcek ilacı, bitki büyütme
düzenleyicileri olarak tarımsal biyoteknolojik çalışmalarda
kullanılmıştır. Nanomalzemelerin
çeşitlerinin, partikül
büyüklüğünün, yüzey yükünün
ve yüzey modifikasyonunun bitki büyümesi üstündeki
etkileri detaylıca çalışılmaktadır.
Fakat, kuantum noktaların (QDs) tarımda kullanımı
hala araştırılmak olan ve üzerine
çalışılan bir alandır. Tarımda
kullanılmak üzere geliştirilmesi
hedeflenen yeni kuantum noktaların ve nanomalzemelerin
amacı daha fazla bitki büyütmek ve daha çok verim almak ve bununla beraber böcek ilaçlarının çevresel tehlikesini azaltmaktır. Düşük
maliyetli, toksik olmayan, biyobozunur,
çok fonksiyonlu hidrojel
temelli, kuantum noktalarla zenginleştirilmiş,
düşük salım ve su tutma kapasiteli gübreler üretmek önem arz etmektedir. Bu çalışmada,
gübre ajanı olarak kuantum noktaları biyopolimer içine
hapsederek yenilikçi, ekonomik, kompozit gübre teknolojisi geliştirilmesi planlanmaktadır. Bu yöntemin avantajları mahsullerin kalitesini artırmak,
toprağın verimini artırmak ve sulama sıklığını azaltmaktır. Dahası, üretilen
hidrojel içindeki
kuantum noktaların yavaş salımı yetiştirilen ürünlerin
yaşam süresiyle
tamamen eşleşebilir, bu da aşırı doz riskini azaltmayı ve çevresel
sorunlardan kaçınmayı garantiler. Bu şekilde, daha önce
bahsedilen malzeme özellikleri ve su tutma
kapasitesinin diğer avantajlarına ek olarak
nitrojen (N), fosfat (P), potasyum (K), ve silisyum (Si) ile dopinglenmiş karbon kuantum noktaların gübre olarak takviye edilmesi yavaş
salımı gerçekleştirmeyi mümkün kılacaktır. Türkiye,
Malezya ve Endonezya?nın içinde olduğu üç farklı ülkeden
dört üniversite
kimya, mühendislik ve tarım alanlarındaki uzmanlığı ve edinilmiş
tüm bilgileri bir araya getirerek uluslararası düzeyde eşi görülmemiş bir sinerji yaratacaktır.
Ayrıca, sürdürülebilir gıda üretimi için önerilen yenilikçi
sistemin gelişimi Güneydoğu
Asya-Avrupa bilim kurulu tarafından üretilen
uygulamalı bilimsel bilgiyi ve uluslararası görünürlüğü
artıran bir kazanç olacaktır. Laboratuvar ve
saha deneylerinin sonuçlarıyla birlikte önerinin getirileri sadece Avrupa ve Güney Asya için değil aynı zamanda tüm
dünya için
tarımsal biyoteknoloji uygulamaları açısından yenilikçi
ve önemli kavrayış
ve bakış açısı
sunacaktır. Teknoloji hazırlık seviyesinin TRL-4 olması beklenmektedir ve bu da
önerinin çıktılarını
piyasaya aktarılabilir kılacaktır.


Esnek Kıyafetli Giyilebilir
Alt Gövde Dış İskelet Sistemi
- Proje
Yürütücüsü: Doç. Dr. İkilem Göcek (Yürütücü), Öğr. Gör. Dr. Merve Acer Kalafat (Araştırmacı)
- Projeyi
Destekleyen Kuruluş: TÜBİTAK 1003
(Proje no:118E924)
Özet:
Bu Proje TÜBİTAK 1003
Öncelikli Alanlar Ar-Ge Projeleri Destekleme Programı üzerinden “Robot Tasarımı
ve Mimarisi” çağrı üzerinden Büyük Ölçekli Proje türünde desteklenerek
01/02/2023 tarihinde tamamlanmıştır. Proje, Özyeğin Üniversitesi ana proje
yürütücüsü, Boğaziçi Üniversitesi 1. alt proje yürütücüsü ve İstanbul Teknik
Üniversitesi 2. alt proje yürütücüsü olarak üç üniversitenin iş birliği ile
gerçekleşmiştir. İTÜ’de yürütülen projenin yürütücülüğünü Tekstil Teknolojileri
ve Tasarımı Fakültesinden İkilem Göcek yapmıştır. İTÜ Makina Fakültesinden
Merve Acer Kalafat da araştırmacı olarak görev almıştır.
Bu projede bel
ağrısı, felç ve benzeri rahatsızlıklar nedeniyle alt ekstremite
motor fonksiyonlarını kaybetmiş belden aşağısı felçli kişilerin kullanımı için
esnek kıyafetli yeni giyilebilir dış iskelet sistemi geliştirilmiştir.
Serigrafi yöntemiyle kullanıcının eklem açılarını takip edebilen tekstil
tabanlı gerinim sensörleri ve yürüme esnasında ayak
tabanındaki yükleri gözlemlemeye yarayan esnek düşük profilli kuvvet sensörleri üretilmiştir. Bu sensörler,
seri elastik aktüatörler tarafından çalıştırılan rijit bağlantılı bir dış iskelet de kullanılmak üzere
tasarlanmıştır. Projenin sonucunda aşt gövde dış
iskelet kullanıcısının fiziksel durumu giyilebilir sensörlü bir kıyafete
gözlemlenebilen bir tasarım gerçekleştirilmiştir.

Tekstil tabanlı
esnek gerinim sensörü

Dış iskelet
sisteminde gerinim sensörünün kullanımı

Ayak için
tasarlanmış esnek kuvvet sensörü
İTÜ Ev Sahipliğinde TOK
2023 Otomatik Kontrol Ulusal Toplantısı Gerçekleşti
14-16 Eylül 2023
Cumhuriyetimizin 100.
yılı, İstanbul Teknik Üniversitesi'nin kuruluşunun 250. yılı ve Otomatik
Kontrol Türk Milli Komitesi'nin (TOK) 65. kuruluş yıldönümüne denk gelen 2023
yılında ülkemiz için stratejik öneme sahip kontrol ve otomasyon konularındaki
son gelişmelerin sunulduğu 24. Otomatik Kontrol Ulusal Toplantısı, İstanbul
Teknik Üniversitesi'nin ev sahipliğinde gerçekleştirildi.
Sempozyum, Kontrol ve
Otomasyon Mühendisliği Bölümü'nden Prof. Dr. Mehmet Turan Söylemez ve Doç. Dr.
Ali Fuat Ergenç ile Makina Mühendisliği Bölümü'nden Doç. Dr. Zeki Yağız
Bayraktaroğlu'nun eş başkanlığını üstlendiği bir platform olarak düzenlendi.
154 makalenin sunulduğu etkinlikte, en az iki bağımsız hakem süzgecinden geçmiş
çalışmalar incelendi. Ayrıca, Prof. Dr. Atilla Bir, Prof. Dr. Frank Allgöwer, Prof. Dr. Maria Prandini,
Prof. Dr. Erdal Kayacan, Prof. Dr. Hajime Asama ve
(çevrimiçi olarak) Prof. Dr. Dang-Il (Dan) Cho gibi alanında önde gelen isimler davetli konuşmacı
olarak yer aldı.
Otomatik Kontrol Türk
Milli Komitesi'nin ulusal üyesi olduğu International Federation
of Automatic Control (IFAC), sempozyuma en üst
düzeyde destek verdi. Bu çerçevede, IFAC başkanlığı yapmış ya da yapacak bilim
insanları, sempozyumda davetli konuşmacı olarak yer alarak önemli bir katkı
sağladılar. Bu durum, TOK 2023'ü dört adet IFAC başkanının çağrılı konuşmacı
olarak yer aldığı ilk sempozyum olarak tarihe geçirdi.
Ülkemiz için ekonomik
olarak zorlu bir dönemeçten geçtiğimiz bu dönemde sempozyumda 3 adet ana
sponsor, 3 adet altın sponsor ve iki adet gümüş sponsor yer alması endüstrinin
sempozyum konularına verdiği önemi ve öğretim üyelerimizin endüstri olan
temaslarının gücünü bir defa daha kanıtladı.
Sempozyumun açılışında
konuşan İTÜ Rektörü Sn. Prof. Dr. İsmail Koyuncu, Otomatik Kontrol Türk Milli
Komitesi'nin, 1958'de IFAC'in kuruluşundan sadece
birkaç ay sonra, Prof. Mehmet Münir Ülgür ve Prof.
Dr. Mehmet Nimet Özdaş tarafından Türk Otomatik
Kontrol Kurumu adıyla kurulduğunu vurguladı. Ayrıca, 1980 yılında Elektrik ve
Elektronik Fakültesi altında kurulan Kontrol ve Bilgisayar Mühendisliği
Bölümü'nün, 43 yıldır İTÜ'nün kontrol mühendisliği konularında en üst seviyede
eğitim verdiğini belirtti. Bu sürecin, ülke ve üniversite için taşıdığı önemi
vurguladı.
Üç gün süren sempozyumun
gala yemeği 15 Eylül 2023 akşamı İstanbul Üniversitesi Baltalimanı
tesislerinde yapıldı. Ayrıca, sosyal program dahilinde boğazda tekne turu ve
isteyen katılımcılar için tarihi yarımada turu düzenlendi.